|
第2部分:力传感线性罐是如何工作的?
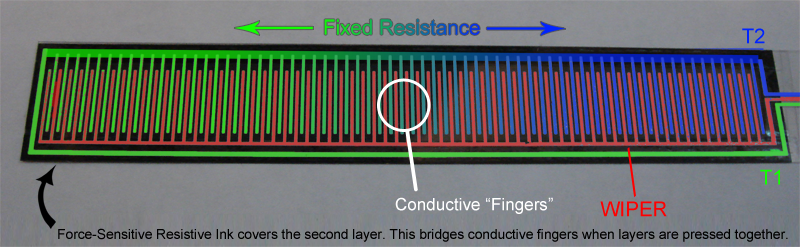
与任何电位器一样,力敏线性电位器有3根引线。有一个雨刮器终端和两个终端,我们给它们贴上T1和T2的标签。
这是我们使用的传感器的照片:
您可能有一个具有不同打印布局的传感器,但概念应该相同。这是同一个传感器,上面有标签:
测量位置的工作原理与标准旋钮电位计完全相同。T1和T2记录道之间是一个长的固定电阻,横跨整个传感器区域,在我们的例子中是10k。当施力时,雨刮器在沿电阻范围的某个点处接触。对于位置,我们需要找到RT1-WIPER或RT2-WIPER,所以我们将在T1,接地T2处应用Vcc,并读取WIPER处的电压。
传统的电位器不测量力,所以这里的情况有所不同。扭壶的雨刮器电阻(实际上)为零;雨刮器直接接触固定电阻上的某个点。但在我们的FSLP上,在第二层的电阻墨水部分桥接了雨刮器上的手指和固定电阻。当层压在一起时,这种连接的电阻减小。
因此,FSLP雨刮器的有效电阻值与力成反比。为了读取力,我们将测量RWIPER。
既然我们知道了它的工作原理,让我们尝试一下第3部分:硬件连接
好了,该吃面包了。
在前一节中,我们讨论了需要读取的两个阻力值,以确定位置+力。模拟方面,我们需要使用两个不同的电路,但我们将通过简单地改变Arduino上的管脚模式来来回切换。
以下是等效电路:
在位置模式下,比率位置等于VADC U输入/Vcc。
在本教程中,我们只需要一个相对/大概的力读数,并考虑RFIXED-1与RFIXED-2并行的效果可以忽略不计。如果我们需要更好的精度,我们将使用已知的RFIXED值和我们的位置读数来计算两个平行段的电阻,并在软件中消除附加电阻。
实际电路
这是我们要试验的实际电路,非常简单。
重要提示:您的传感器可能有不同的连接器,或者没有连接器(在这种情况下,您需要一个FPC连接器或压接器)。不要试图直接焊接到传感器膜上。它会融化的。
fslp在平坦的表面上工作得最好。你可能想把传感器的边缘贴下来,这样它就不会滑动。
以下是我们在实验板上的样子(点击图片查看完整尺寸)。
我们的传感器插在一个小适配器板下面的FFC连接器上,我们用一些纸板和胶带把东西固定在适当的位置。
可能会更漂亮,但会有用的!
接下来是一个Arduino的草图 |